【鉄道業界考察】車体傾斜車両について考える:振り子式編 https://www.youtube.com/watch?v=OITSBuq_vaU
鐵道情報 https://m.facebook.com/RailNews.tw/posts/1624691844237938
臺大鐵道暨火車研習社 https://m.facebook.com/nturail/posts/1248048848671007/
臺灣傾斜式列車的技術與發展作者 https://www.shs.edu.tw/works/essay/2016/04/2016040610133179.pdf
https://www.jstage.jst.go.jp/article/sicejl/56/2/56_123/_pdf
https://www.jstage.jst.go.jp/article/sicejl/56/2/56_81/_pdf
振子車両とは?https://www.shikoku.org.uk/JR/CAR/furiko/furiko.htm#air-sus
振子特急 https://www.toretabi.jp/train/vol08/01.html
TTX https://www.youtube.com/watch?v=yPqFmdVHU1g
車体傾斜式車両https://ja.wikipedia.org/wiki/%E8%BB%8A%E4%BD%93%E5%82%BE%E6%96%9C%E5%BC%8F%E8%BB%8A%E4%B8%A1
●自然傾斜式→緩和曲線容易發生「擺盪延遲」以及「回擺」
自然傾斜式(含控制自然傾斜式)車身傾斜的旋轉中心被設定為高於重心,i.e.車體可以傾斜角度比轉向架更大
●控制自然傾斜式→在自然傾斜機構的基礎上增加了通過氣壓進行主動傾斜控制的機構。JR四國2000系是世界首個。即使控制裝置規避或故障,也只是回到自然傾斜式而已,依然能夠安全傾斜。
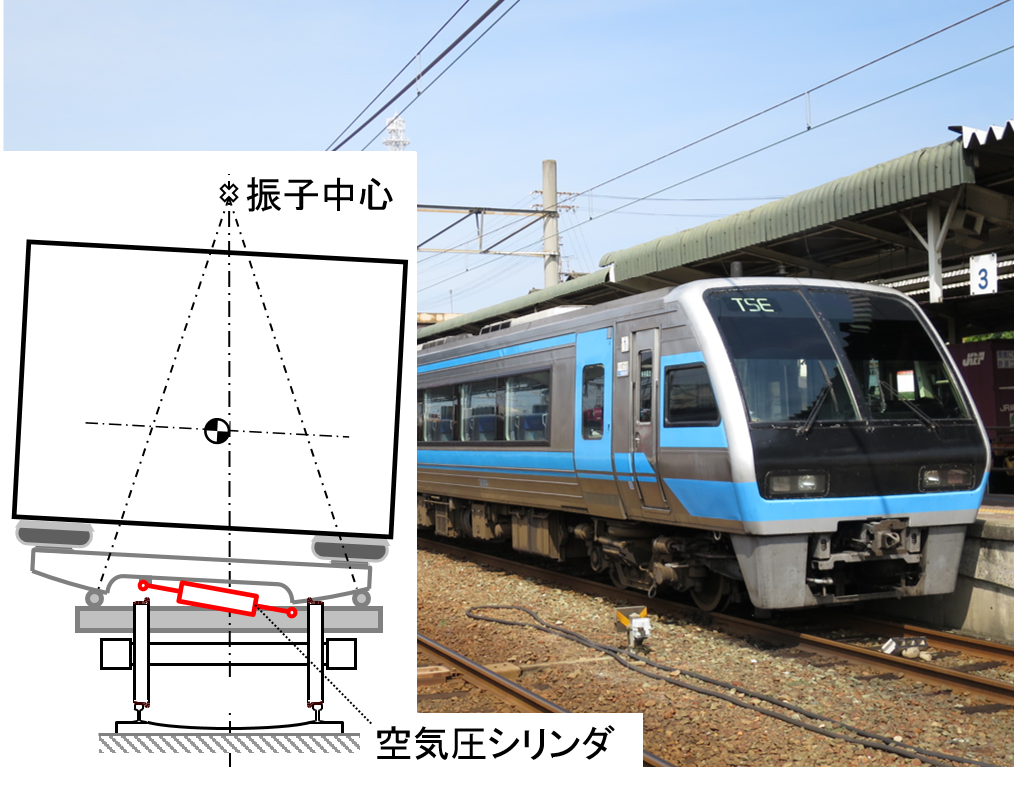
首先,將軌道上的每條彎道的傾斜等所有地面數據的信息預先記錄在內置於稱為指令控制裝置的車載裝置中的微型計算機中,記錄在那裡的彎道信息是速度發電。利用飛行器和地面上的ATS地面元件獲得的絕對位置信息和測速器檢測獲得的速度信息,計算出鬆弛曲線段中合適的機身傾斜角。指令控制裝置根據那裡獲得的傾斜角度信息,將車身傾斜定時的指令傳送到安裝在每輛汽車上的擺錘指令裝置,在進入曲線前的鬆弛曲線段中使用氣缸的致動器主動傾斜車身提前。在通過曲線段後的鬆弛曲線段,通過同樣的方法主動恢復車身傾斜度。通過這樣的控制,在鬆弛曲線區間產生的瞬態振動被抑制。車體的傾斜在進出彎段時是由執行器強制控制的,但由於是輔助傾斜控制,即使這個控制裝置沒有正確操作,也會受到原有的多餘離心力的影響。確保傾斜安全。
,▲滾柱式
 https://astamuse.com/ja/published/JP/No/2012201328
https://astamuse.com/ja/published/JP/No/2012201328
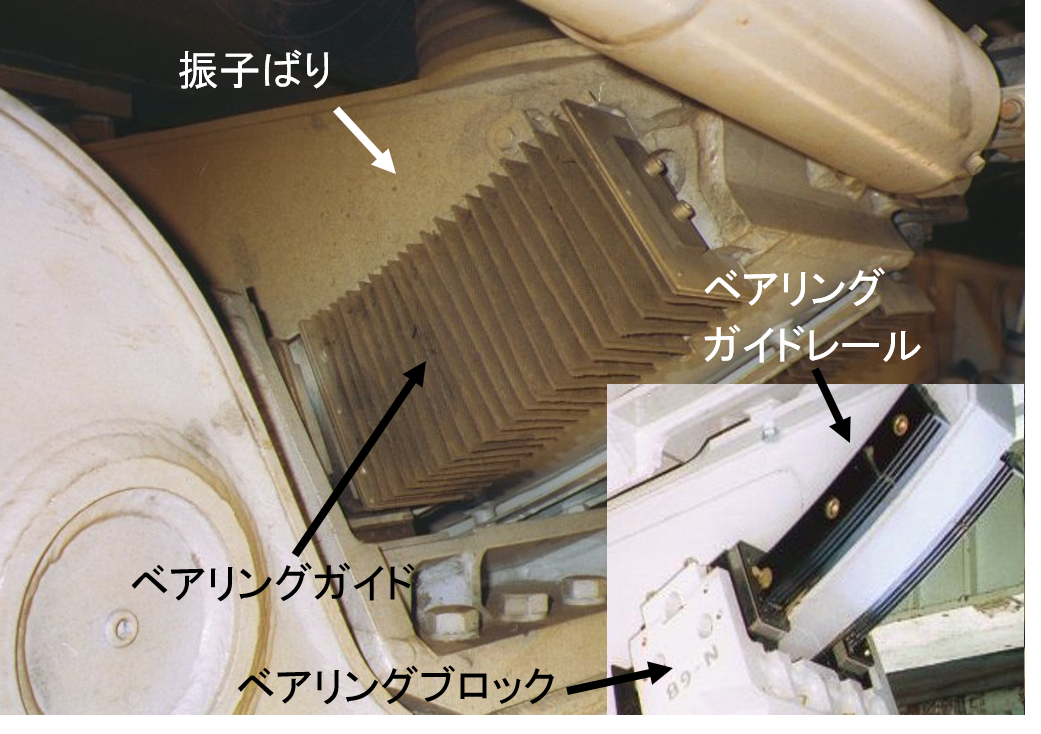
,▲承軸導向式(ベアリングガイド式,Bearing Guide)
 https://www.rtri.or.jp/rd/news/vehicle/vehicle_201901.html
https://www.rtri.or.jp/rd/news/vehicle/vehicle_201901.html
日本有兩種受控自然擺式車身傾斜機構:滾柱式和軸承導向式。最早投入實際使用的自然擺型381系列採用滾輪式,但擺的中心,即車身傾斜的中心,不能根據需要降低。裝置的複雜性,軸承導軌式的開發得到了推進。 開發的軸承導向型實現了擺時滑動阻力的降低、擺裝置的小型化、防塵裝置的簡化等,並被JR四國8000系列和JR北海道281系列的原型車採用。

JR集團公司在引進包括新幹線車輛在內的“空氣彈簧車身傾斜系統”的同時,JR四國也在2017年採用“空氣彈簧車身傾斜系統”作為老化的2000系列的繼承者。雖然我們製作了2600系列氣動車的原型,由於運行測試,量產被推遲,因為它消耗大量空氣來控制彎曲部分特別多的土贊線上的空氣彈簧,並且在確保空氣容量方面存在問題。政策改為在2600系列氣動車的基礎上量產可控自然擺式2700系列氣動車,2019年原型車和量產車均出現,同年8月開始商業運營. 這輛2700系列是繼Kiha 187系列後18年來第一款新型自然擺式車型。
●強制傾斜式
強制車身傾斜式在通過彎道時,通過液壓等使由連桿等構成的車身傾斜機構主動傾斜。有時稱為強制擺式。由於通過彎道時施加在車身上的多餘離心力不用於車身傾斜,因此車身傾斜的旋轉中心不一定要高於重心,但大多數實際強制車身傾斜型車輛過大 旋轉中心設置在與重心相同或高於重心的位置,以使離心力不會對車身傾斜產生不利影響。此外,為了使強制車身傾斜機構在通過彎道時能夠正確操作,還需要一個檢測彎道進入並控制車身傾斜的裝置,這與不需要這樣的自然擺式相比。裝置結構變得複雜。
強制身體傾斜式主要流行於歐美 在早期的強制車身傾斜式中,通過安裝在每輛汽車上的陀螺儀和加速度計檢測彎道接近,對每輛傾斜車身的車輛都有許多反饋控制。在該方法中,由於在進入彎道後車身傾斜,因此存在總是發生擺動延遲的問題。在許多情況下,由於傳感器的故障而不能正確地檢測到彎道的接近,這一直是實際使用的障礙。之後,隨著電子學的發展,可以計算出最佳傾斜角度,並以編隊為單位控制車身的傾斜,同時也提高了彎道接近檢測的準確性。關於擺動延遲,開發了一種控制方法,通過安裝在前車上的傳感器檢測彎道接近,並根據來自的命令依次傾斜後車的車身,從而防止前車以外的擺動延遲。領先的汽車,以組織為單位的反饋控制是主流。在某些情況下,還進行前饋控制,根據輸入到車載計算機的線性數據的車輪轉速和已經通過的彎道信息,計算出當前運行位置。預測下一條彎道並使用傳感器。它已投入實際使用,甚至可以在檢測到彎道之前使車身傾斜。
一般來說,最大傾角大於自然擺型,意大利的Pendolino為8-10度,瑞典的X2000為6.5度。
●空氣彈簧傾斜式
●混合傾斜式(自然傾斜+空氣彈簧)
=======================================================
日本分法
| 自然傾斜 |
| 控制自然傾斜 |
| 強制傾斜(歐美多,多為液壓,控制故障則無法傾斜) |
| 空氣彈簧(傾斜角度相較其他較小,控制故障則無法傾斜) |
推測實際上為:
| 被動(自然)傾斜 | (無控制)自然傾斜 | |
| 控制自然傾斜(控制關閉時) | ||
| 控制自然傾斜 | ||
| 主動傾斜 | ||
| 強制傾斜 | 液壓 | |
| 空氣彈簧(傾斜角度相較其他較小) | ||
空氣彈簧傾斜角度相較其他較小,因此常獨立出來
Talgo 空氣彈簧是自然傾斜,不知是無控制還是控制
其他歐洲:APT, Pendolino, X2000,似乎都是液壓
控制自然傾斜,控制是輔助
強制傾斜,控制是必要
--------------------------------
自然傾斜(含控制自然傾斜),翻滾(roll)中心要高於車輛重心
強制傾斜(不知道空氣彈簧是否如此),翻滾(roll)中心不用高於車輛重心,但通常高於或等於車輛重心
Neigetechnick
ETR 450 https://www.youtube.com/watch?v=gIr_j5tsBXQ
eaton https://www.youtube.com/watch?v=_DGvG-Tsi5A
VT611 https://www.youtube.com/watch?v=SJhr125BqKI
ICE T https://www.youtube.com/watch?v=4T4KQb2Ism4/https://www.youtube.com/watch?v=y7-11BgXzuI
Class 390 https://www.youtube.com/watch?v=YXT2dA9m96Y
ICN https://de.wikipedia.org/wiki/Neigetechnik
2700系実演 https://www.youtube.com/watch?v=e9GwigMfCuY
783系実演 https://www.youtube.com/watch?v=jhABv_MRDto

請先 登入 以發表留言。